HoloArm (2024)
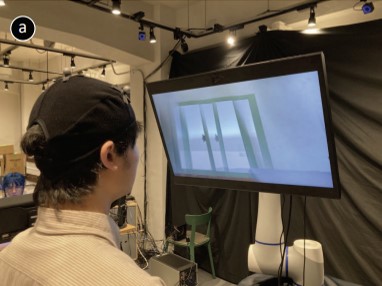
HoloArm: A Face-Following 3D Display Using Autostereoscopic Display and Robot Arm
Koya Dendo, Yuta Itoh, Émilie Fabre, Jun Rekimoto
Abstract
This work introduces HoloArm, an actuated autostereoscopic display that consistently maintains itself in front of the user. This system balances an actual-size presentation of stereoscopic 3D contents with quick real-virtual context switch capabilities.Three-dimensional displays are known to enhance users’ spatial awareness and immersion in content. However, the predominant head-mounted displays obstruct users’ view of the real world and necessitates cumbersome donning and doffing. And autostereoscopic displays allow 3D viewing without eye-glasses, but are constrained by a limited field of view and display size. To address these challenges, HoloArm obviates the need for users to wear additional equipment and dynamically adjusts the display according to the user’s face position and orientation, achieving a broad field of view and large image display. We have implemented a prototype of HoloArm and evaluated its tracking latency.